
这是第二个完整的控制组小车题目,是21年的电赛F题
以下是赛题的任务部分,要求双车协同,并且能识别数字完成对应任务。

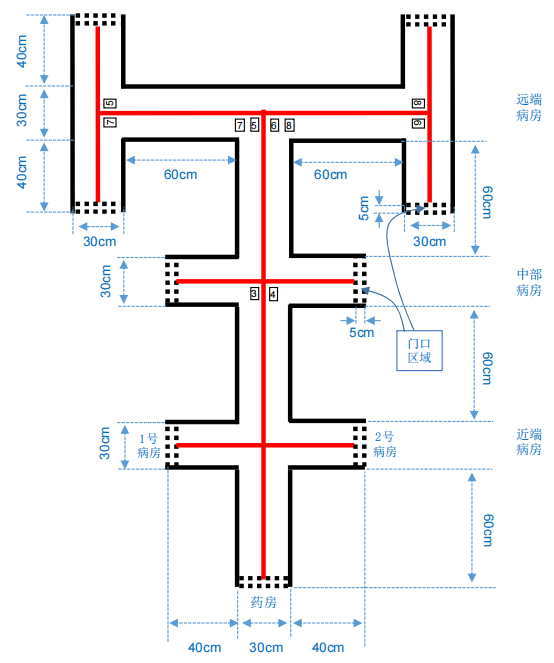
基于STM32的智能送药小车
本设计采用STM32单片机作为主控模块,打造了一款智能送药小车控制系统。该系统主要整合了OpenMV机器视觉模块、蓝牙通信模块、电机驱动和电源模块。通过OpenMV机器视觉,系统能够精准采集图像并进行模板匹配,生成专属的数字检测模型。两轮小车的设计提高了转向灵活性,同时有效减少占用空间,适合在狭窄环境中运行。蓝牙模块确保了稳定的远程通信,而高效电机驱动则保障了小车的平稳快速行驶。该系统不仅技术先进,而且实用性强,为医疗输送提供了智能化解决方案。
系统方案
本小车系统主要由循迹模块、数字识别模块、药品检测模块、电机控制模块组组成,下面先分别论证模块的选择
循迹模块
方案一:使用Openmv机器视觉模块。将摄像头拍摄到的图片转化为灰度图并划分为6部分,在不同区域分别确定色块位置,根据位置判定十字路口,丁字路口和直线。在直线运动阶段,通过直线色块中心点坐标与图像中心点坐标之差确定误差值,传输给下位机调节PID。
方案二:使用红外传感器。通过接收器接收红色电工胶带发出的红外线,根据接收器信号确定小车与路径相对位置,通过PID调节位置偏移量。红外传感器对于红色路径识别度较低,故舍弃改方案。
方案三:使用灰度传感器。使用高亮LED灯,通过接收管对不同强度反射光的强弱处理对比区分出路径,将接收器接收到的信号传入STM32中,通过PID调节位置偏移量。灰度传感器容易受到环境影响,所以舍弃该方案。
为保证识别精度,确保巡线的稳定性,所以选择方案一。
数字识别模块
方案一:使用k210机器视觉模块。通过配置环境以及制作数据集进行本地训练,随着数据集中数据量的增大,识别精度也随之升高。且k210环境配置简单,训练方便。
方案二:使用树莓派模块。通过配置环境,编写树莓派代码以及制作数据集进行训练,相较于k210数字识别,树莓派环境配置更繁琐,且安装繁琐。
方案三:使用Openmv摄像头进行模板匹配,匹配到模板的数字后返回给单片机,由单片机执行对应操作
组内仅有Openmv摄像头,所以选择方案三。
电机控制模块
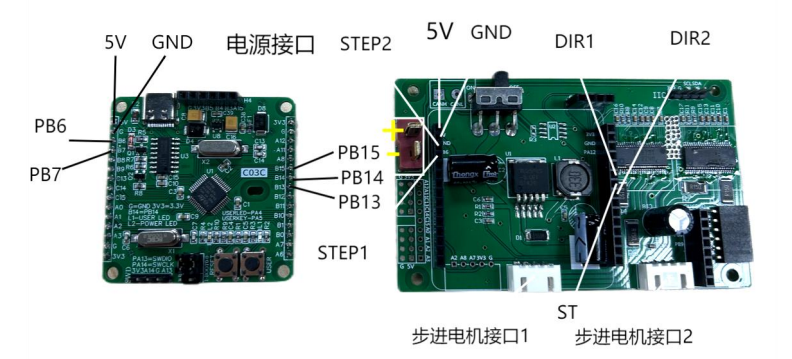
因为这次使用的电机由直流电机换成了步进电机,所以驱动模块由TB6612改成了步进电机双路驱动底板(D302A),本驱动底板使用的芯片为 LV8731V 步进电机驱动芯片。
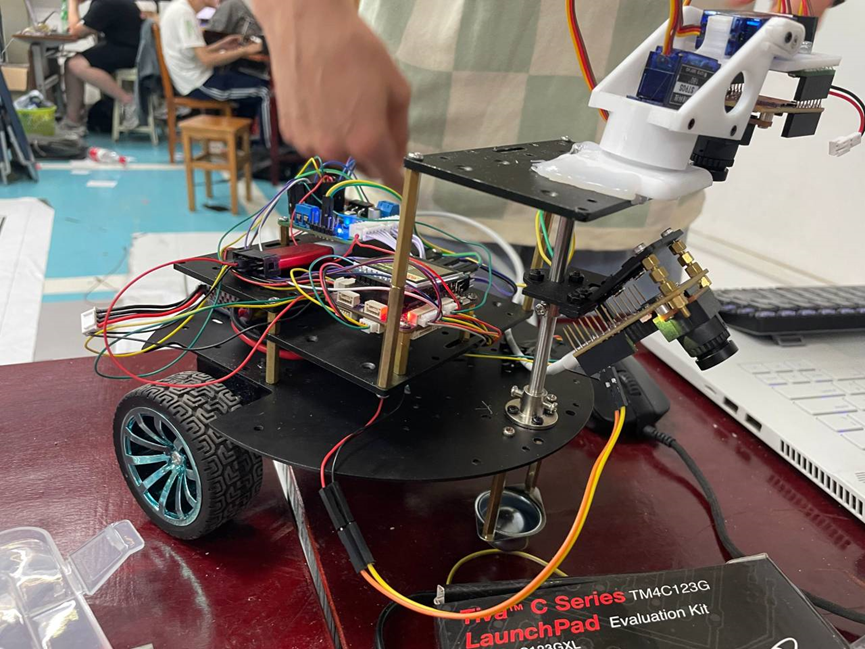
小车实物
程序设计
mian.c
包含模块化程序设计
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "drv_Main.hpp"
#include "drv_LED.hpp"
#include "drv_LCD.hpp"
#include "drv_Key.hpp"
#include "Commulink.hpp"
#include "drv_MPU6050.hpp"
#include "Control.hpp"
#include "GUI.hpp"
#include "Show.hpp"
#include "Sg90.hpp"
/*
* WHU-CAR 接口说明
* PD4 ---> AIN1
* PC12 ---> AIN2
* PD11 ---> BIN1
* PD10 ---> BIN2
* PE10 ---> STBY
* PD12 ---> E2A T4C1
* PD13 ---> E2B T4C2
* PC6 ---> E1A T3C1
* PC7 ---> E1B T3C2
* PE14 ---> PWMA T1C4
* PE13 ---> PWMB T1C3
* PC2 ---> ADC ADC123IN12
*/
#define STBY PEout(10)
// 获取角度的算法,1:四元数 2:卡尔曼 3:互补滤波
u8 Way_Angle = 1;
// 蓝牙遥控相关的变量
u8 Flag_front, Flag_back, Flag_Left, Flag_Right, Flag_velocity = 2;
// 电机停止标志位 默认停止
u8 Flag_Stop = 1;
// 电机PWM变量
int Motor_Left, Motor_Right;
// 温度变量
int Temperature;
// 左右编码器的脉冲计数
int Encoder_Left, Encoder_Right;
// 电池电压采样相关的变量
int Voltage;
// 平衡倾角 平衡陀螺仪 转向陀螺仪
float Angle_Balance, Gyro_Balance, Gyro_Turn;
float Track_Bias;
// 延时和调参相关变量
int delay_50, delay_flag;
// 蓝牙模式、普通模式标志位
u8 Flag_Blooth = 0, Flag_Normol = 1;
// 获取时钟
RCC_ClocksTypeDef RCC_CLK;
// Z轴加速度计
float Acceleration_Z;
// PID参数(放大100倍)
float Balance_Kp = 20500, Balance_Kd = 110, Velocity_Kp = 16000, Velocity_Ki = 80, Rotate_Turn_Kp = 6000, Rotate_Turn_Kd = 0,Track_Turn_Kp=1400,Track_Turn_Kd=0;
// 车轮速度(mm/s)
float Velocity_Left, Velocity_Right;
// 平衡环PWM变量,速度环PWM变量,转向环PWM变量
int Balance_Pwm, Velocity_Pwm, Rotate_Turn_Pwm,Track_Turn_PWM;
// 位置PID控制变量,速度PID控制变量
int Pos_Pwm, Vel_Pwm;
// 位置PID系数
float Position_KP = 20, Position_KI = 0.0785, Position_KD = 182.7;
//float Position_KP = 15.5, Position_KI = 0.06, Position_KD = 140;
// 速度PID系数
float Velocity_KP = 30, Velocity_KI = 6, Velocity_KD = 0;
// 位置PID设定目标数
int Target_Position_L = 800, Target_Position_R = 800;
// 速度PID设定目标数
int Target_Velocity_L = 10, Target_Velocity_R = 20;
int main(void)
{
init_Basic();
// 初始化设备驱动
init_drv_Main();
// 初始化开始声音
sendLedSignal(LEDSignal_Start1);
// 初始化控制系统
init_drv_ControlSystem();
// 设置初始化已完成
setInitializationCompleted();
// 获取时钟
RCC_GetClocksFreq(&RCC_CLK);
STBY = 1;
// 进入主循环
while (1)
{
// 调试模式的选择
#if Debug
DataScope();
delay_ms(50);
#else
Commulink_Server();
// 显示
GUI_Server();
#endif
}
}control.c
主控程序
#include "Control.hpp"
#include "drv_ADC.hpp"
#include "drv_Encoder.hpp"
#include "drv_MPU6050.hpp"
#include "drv_Key.hpp"
#include "drv_LED.hpp"
#include "GUI.hpp"
#include <stack>
using namespace std;
#define APB2TIMERCLK 72000000
#define AIN1 PDout(4)
#define AIN2 PCout(12)
#define BIN1 PDout(11)
#define BIN2 PDout(10)
#define LEFTTURN 1
#define RIGHTTURN 2
// 识别到路口至正好行驶到路口上进行旋转的延时时间
int StopDelayTimes = 110;
// 在第几个路口停
int StopCrossNum;
// 识别到的病房号
int IdentifiedNum;
// 是否为近端病房
bool CloseWard;
// 延时计数
int StopDelayCount;
// 标识开始延时
bool ReadyStopFlag;
bool Mark180Flag;
float TargetYaw;
float TargetVelocity = 30;
bool TrackFlag = true;
bool Turn180Flag;
bool TurnLeft90Flag;
bool TurnRight90Flag;
bool CrossFlag;
bool GoBackFlag;
int GoBackCount;
int GoBackTimes = 200;
bool ArrivedFlag;
bool ReturnFlag;
bool JudgingFlag;
// 数字识别转向方向
int TurnSignal;
int JudgingCount;
int JudgingTimes = 400;
int ArrivedNum;
int CrossNum = 0;
int ArrivedCount;
bool PassCrossFlag;
int PassCrossTimes = 400;
int PassCrossCount;
int ArrivedTimes;
int Trace[5];
int TracePtr;
int TraceBit;
extern "C" void TIM8_UP_IRQHandler(void)
{
if (TIM_GetFlagStatus(TIM8, TIM_FLAG_Update) == SET)
{
TIM_ClearITPendingBit(TIM8, TIM_IT_Update);
if (getInitializationCompleted() == false)
{
return;
}
Get_Angle(Way_Angle);
Encoder_Left = -Read_Encoder(4);
Encoder_Right = -Read_Encoder(3);
Key();
if (Flag_Stop)
{
Led_Flash(0);
}
else
{
Led_Flash(100);
}
// 路口判断
if (CrossNum == StopCrossNum && CrossFlag && !ReturnFlag)
{
// 不是近端病房就停下来识别,第三个路口也不不识别,直接左转
if (!CloseWard && StopCrossNum != 3)
{
// Flag_Stop = true;
GoBackFlag = true;
}
// 是近端病房就开始停止延时
else
{
ReadyStopFlag = true;
}
CrossFlag = false;
}
GoBack();
if (CrossFlag && ReturnFlag)
{
if (TracePtr - 1 >= 0)
{
ReadyStopFlag = true;
}
}
// openmv长时间识别不出就算直行
if (JudgingFlag)
{
JudgingCount++;
if (JudgingCount >= JudgingTimes)
{
TargetVelocity = 30;
if (CrossNum == 2)
{
Flag_Stop = false;
JudgingFlag = false;
JudgingCount = 0;
StopCrossNum = 3;
PassCrossCount = 0;
PassCrossFlag = true;
StopDelayTimes = 100;
}
if (CrossNum == 4)
{
Flag_Stop = false;
JudgingFlag = false;
JudgingCount = 0;
StopCrossNum = 6;
TargetVelocity = 0;
Turn180Flag = true;
Trace[TracePtr - 1] = RIGHTTURN;
}
}
}
// 识别路口的延时
if (PassCrossFlag)
{
if (PassCrossCount > PassCrossTimes)
{
PassCrossCount = 0;
PassCrossFlag = false;
}
else
{
PassCrossCount++;
}
}
// 开始延时
if (ReadyStopFlag)
{
StopDelayCount++;
if (StopDelayCount == StopDelayTimes)
{
// 停车+复位
TargetVelocity = 0;
StopDelayCount = 0;
ReadyStopFlag = false;
// 转向标识设置
TrackFlag = false;
// 近端病房
if (!ReturnFlag && CloseWard)
{
if (IdentifiedNum == 1)
TurnLeft90Flag = true;
if (IdentifiedNum == 2)
TurnRight90Flag = true;
}
else if (!ReturnFlag && !CloseWard)
{
// 判别左转或遇到第3个十字路口
if (TurnSignal == 11)
TurnLeft90Flag = true;
if (TurnSignal == 12)
TurnRight90Flag = true;
if (StopCrossNum == 3)
{
// 下一个路口要判断数字
StopCrossNum = 4;
TurnLeft90Flag = true;
}
TurnSignal = 0;
}
// 回程的转向控制
else if (ReturnFlag)
{
TracePtr--;
if (TracePtr >= 0)
{
int direction = Trace[TracePtr];
if (direction == LEFTTURN)
TurnRight90Flag = true;
else
{
TurnLeft90Flag = true;
}
}
}
}
}
if (TurnLeft90Flag)
{
if (Yaw > 170)
{
TargetYaw = -Yaw + 90;
}
else
{
TargetYaw = Yaw + 90;
}
TurnLeft90Flag = false;
Flag_Left = true;
if (!ReturnFlag)
{
Trace[TracePtr++] = LEFTTURN;
}
}
if (TurnRight90Flag)
{
if (Yaw < -170)
{
TargetYaw = -Yaw - 90;
}
else
{
TargetYaw = Yaw - 90;
}
TurnRight90Flag = false;
Flag_Right = true;
if (!ReturnFlag)
{
Trace[TracePtr++] = RIGHTTURN;
}
}
if (Turn180Flag)
{
ArrivedCount++;
if (ArrivedCount == 50)
{
TargetVelocity = 0;
if (Yaw < 0)
TargetYaw = Yaw + 180;
else
TargetYaw = Yaw - 180;
Turn180Flag = false;
Flag_Left = true;
ArrivedCount = 0;
// Mark180Flag=true;
}
}
if (Flag_Left == 1 || Flag_Right == 1)
{
// 转向后恢复前进
if (myabs(Yaw - TargetYaw) < 15)
{
Flag_Left = 0;
Flag_Right = 0;
Track_Bias = 0;
Set_Pwm(0, 0);
TargetVelocity = 30;
TrackFlag = true;
if (ArrivedFlag)
{
TargetVelocity = 0;
}
StopDelayTimes = 110;
if (ArrivedNum == 2)
{
ArrivedNum = 0;
Flag_Stop = true;
}
}
}
Get_Velocity_Form_Encoder(Encoder_Left, Encoder_Right);
Velocity_Pwm = Velocity(Encoder_Left, Encoder_Right);
Rotate_Turn_Pwm = RotateTurn(Gyro_Turn);
Track_Turn_PWM = TrackTurn(Track_Bias);
Motor_Left = Velocity_Pwm - Rotate_Turn_Pwm + Track_Turn_PWM;
Motor_Right = Velocity_Pwm + Rotate_Turn_Pwm - Track_Turn_PWM;
Voltage = Get_battery_volt();
Motor_Left = PWM_Limit(Motor_Left, 6900, -6900);
Motor_Right = PWM_Limit(Motor_Right, 6900, -6900);
if (Pick_Up(Acceleration_Z, Angle_Balance, Encoder_Left, Encoder_Right))
{
Flag_Stop = 1;
}
if (Put_Down(Angle_Balance, Encoder_Left, Encoder_Right))
{
Flag_Stop = 0;
}
if (Turn_Off(Angle_Balance, Voltage) == 0)
Set_Pwm(Motor_Left, Motor_Right);
}
}
void GoBack()
{
if (GoBackFlag)
{
TargetVelocity = -20;
TrackFlag=false;
GoBackCount++;
if (GoBackCount >= GoBackTimes)
{
TargetVelocity = 0;
GoBackCount = 0;
GoBackFlag = false;
JudgingFlag = true;
PassCrossCount = 0;
PassCrossFlag = true;
TrackFlag=true;
}
}
}
/*
* 函数功能:直立PD控制
* 入口参数:Angle:角度;Gyro:角速度
* 返回 值:balance:直立控制PWM
*/
int Balance(float Angle, float Gyro)
{
float angle_bias, gyro_bias;
int balance;
angle_bias = Middle_angle - Angle;
gyro_bias = 0 - Gyro;
balance = -Balance_Kp / 100 * angle_bias - gyro_bias * Balance_Kd / 100;
return balance;
}
/*
* 函数功能:速度控制PWM
* 入口参数:encoder_left:左轮编码器读数;encoder_right:右轮编码器读数
* 返回 值:速度控制PWM
*/
int Velocity(int encoder_left, int encoder_right)
{
static float velocity, encoder_least, encoder_bias;
static float encoder_integral, target_velocity;
encoder_least = TargetVelocity - (encoder_left + encoder_right);
// 低通滤波
encoder_bias *= 0.84;
encoder_bias += encoder_least * 0.16;
encoder_integral += encoder_bias;
if (encoder_integral > 10000)
{
encoder_integral = 10000;
}
else if (encoder_integral < -10000)
{
encoder_integral = -10000;
}
velocity = -encoder_bias * Velocity_Kp / 100 - encoder_integral * Velocity_Ki / 100; // seems have problems
if (Turn_Off(Angle_Balance, Voltage) == 1 || Flag_Stop == 1)
encoder_integral = 0;
return velocity;
}
/*
* 函数功能:转向控制
* 入口参数:Z轴陀螺仪
* 返回 值:转向控制PWM
*/
int RotateTurn(float gyro)
{
static float Turn_Target, turn, Turn_Amplitude = 54;
float Kp = Rotate_Turn_Kp, Kd;
if (1 == Flag_Left)
{
Turn_Target = -Turn_Amplitude / Flag_velocity;
}
else if (1 == Flag_Right)
{
Turn_Target = Turn_Amplitude / Flag_velocity;
}
else
{
Turn_Target = 0;
}
if (1 == Flag_front || 1 == Flag_back)
Kd = Rotate_Turn_Kd;
else
Kd = 0;
turn = Turn_Target * Kp / 100 + gyro * Kd / 100;
return turn;
}
int TrackTurn(float bias)
{
if (TrackFlag)
{
static float general_bias, turn, last_bias;
general_bias = 0.84 * bias + 0.16 * last_bias;
last_bias = bias;
turn = general_bias * Track_Turn_Kp / 100;
return turn;
}
else
{
return 0;
}
}
/*
* 函数功能:赋值给PWM寄存器
* 入口参数:左轮PWM、右轮PWM
* 返回 值:无
*/
void Set_Pwm(int motor_left, int motor_right)
{
int pwmb, pwma;
if (motor_left > 0)
{
BIN1 = 0;
BIN2 = 1;
}
else
{
BIN1 = 1;
BIN2 = 0;
}
pwmb = myabs(motor_left);
TIM_SetCompare3(TIM1, pwmb);
if (motor_right > 0)
{
AIN1 = 0;
AIN2 = 1;
}
else
{
AIN1 = 1;
AIN2 = 0;
}
pwma = myabs(motor_right);
TIM_SetCompare4(TIM1, pwma);
}
/*
* 函数功能:限制PWM赋值
* 入口参数:IN:输入参数 max:限幅最大值 min:限幅最小值
* 返回 值:限幅后的值
*/
int PWM_Limit(int IN, int max, int min)
{
int OUT;
if (IN > max)
{
OUT = max;
}
else if (IN < min)
{
OUT = min;
}
else
{
OUT = IN;
}
return OUT;
}
/*
* 函数功能:按键修改小车运行状态
* 入口参数:无
* 返回 值:无
*/
void Key(void)
{
u8 temp;
temp = click_N_Double(50);
if (temp == 1)
{
Track_Bias = 0;
if (ArrivedFlag)
{
ArrivedFlag = false;
TargetVelocity = 30;
}
else
{
TurnRight90Flag = TurnLeft90Flag = 0;
Flag_Right = false;
Flag_Left = false;
CrossNum = 0;
Flag_Stop = !Flag_Stop;
}
}
}
/*
* 函数功能:异常关闭电机
* 入口参数:angle:小车倾角;voltage:电压
* 返回 值:1:异常 0:正常
*/
u8 Turn_Off(float angle, int voltage)
{
u8 temp;
if (angle < -40 || angle > 40 || Flag_Stop == 1 || voltage < 1170)
{
temp = 1;
AIN1 = 0;
AIN2 = 0;
BIN1 = 0;
BIN2 = 0;
}
else
{
temp = 0;
}
return temp;
}
/*
* 函数功能:绝对值函数
* 入口参数:a:需要计算绝对值的数
* 返回 值:无符号整型
*/
int myabs(int a)
{
int temp;
if (a < 0)
{
temp = -a;
}
else
{
temp = a;
}
return temp;
}
/*
* 函数功能:检测小车是否被拿起
* 入口参数:Acceleration:z轴加速度;Angle:平衡的角度;encoder_left:左编码器计数;encoder_right:右编码器计数
* 返回 值:1:小车被拿起 0:小车未被拿起
*/
int Pick_Up(float Acceleration, float Angle, int encoder_left, int encoder_right)
{
static u16 flag, count0, count1, count2;
if (flag == 0)
{
// 静止
if (myabs(encoder_left) + myabs(encoder_right) < 30)
{
count0++;
}
else
{
count0 = 0;
}
if (count0 > 10)
{
flag = 1, count0 = 0;
}
}
// 在0度附近被拿起
if (flag == 1)
{
if (++count1 > 200)
{
count1 = 0;
flag = 0;
}
if (Acceleration > 26000 && (Angle > (-20 + Middle_angle) && Angle < (20 + Middle_angle)))
{
flag = 2;
}
}
// 正反馈达到最大转速
if (flag == 2)
{
if (++count2 > 200)
{
count2 = 0;
flag = 0;
}
if (myabs(encoder_left + encoder_right) > 70)
{
flag = 0;
return 1;
}
}
return 0;
}
/*
* 函数功能:检测小车是否被放下
* 入口参数:平衡角度;左编码器读数;右编码器读数
* 返回 值:1:小车放下 0:小车未放下
*/
int Put_Down(float Angle, int encoder_left, int encoder_right)
{
static int flag, count;
if (Flag_Stop == 0)
{
return 0;
}
if (flag == 0)
{
if (Angle > (-10 + Middle_angle) && Angle > (10 + Middle_angle) && encoder_right == 0 && encoder_left == 0)
{
flag = 1;
}
}
if (flag == 1)
{
if (++count > 50)
{
count = 0;
flag = 0;
}
if (encoder_left > 3 && encoder_right > 3 && encoder_left < 40 && encoder_right < 40)
{
flag = 0;
count = 0;
return 1;
}
}
return 0;
}
/*
* 函数功能:编码器读数转换为速度(mm/s)
* 入口参数:无
* 返回 值:无
*/
void Get_Velocity_Form_Encoder(int encoder_left, int encoder_right)
{
float rotation_speed_L, rotation_speed_R;
rotation_speed_L = encoder_left * Control_Frequency / EncoderMultiples / Reduction_Ratio / Encoder_precision;
Velocity_Left = rotation_speed_L * PI * Diameter_67;
rotation_speed_R = encoder_right * Control_Frequency / EncoderMultiples / Reduction_Ratio / Encoder_precision;
Velocity_Right = rotation_speed_R * PI * Diameter_67;
}
/*
* 函数功能:选择小车运行模式
* 入口参数:encoder_left:左编码器读数 encoder_right:右编码器读数
* 返回 值:无
*/
void Choose(int encoder_left, int encoder_right);
void init_drv_ControlSystem()
{
RCC->APB2ENR |= (1 << 13);
// 需要问一下chatgpt
// os_delay(1e-2);
TIM8->PSC = (APB2TIMERCLK / 1000000) - 1;
TIM8->ARR = 1e6 / 200 - 1;
TIM8->DIER = 1 << 0;
TIM8->CR1 = 1 << 0;
NVIC_SetPriority(TIM8_UP_IRQn, 3);
NVIC_EnableIRQ(TIM8_UP_IRQn);
}
int Set_Postion_PID_L(int position, int target)
{
static float bias, pwm, integral_bias, last_bias;
bias = target - position;
integral_bias += bias;
if (integral_bias > 3000)
{
integral_bias = 3000;
}
else if (integral_bias < -3000)
{
integral_bias = -3000;
}
pwm = Position_KP * bias + Position_KI * integral_bias + Position_KD * (bias - last_bias);
last_bias = bias;
return pwm;
}
int Set_Postion_PID_R(int position, int target)
{
static float bias, pwm, integral_bias, last_bias;
bias = target - position;
integral_bias += bias;
if (integral_bias > 3000)
{
integral_bias = 3000;
}
else if (integral_bias < -3000)
{
integral_bias = -3000;
}
pwm = Position_KP * bias + Position_KI * integral_bias + Position_KD * (bias - last_bias);
last_bias = bias;
return pwm;
}
// 增量式PID:P是D,I是P;
int Set_Incremental_PI_L(int incremental, int target)
{
static float bias, pwm, last_bias;
bias = target - incremental;
pwm += Velocity_KP * (bias - last_bias) + Velocity_KI * bias;
last_bias = bias;
return pwm;
}
int Set_Incremental_PI_R(int incremental, int target)
{
static float bias, pwm, last_bias;
bias = target - incremental;
pwm += Velocity_KP * (bias - last_bias) + Velocity_KI * bias;
last_bias = bias;
return pwm;
}其他
可在github中找到(*^_^*)



