
这是2023电赛的E题
基于Tiva的运动目标控制与自动追踪系统
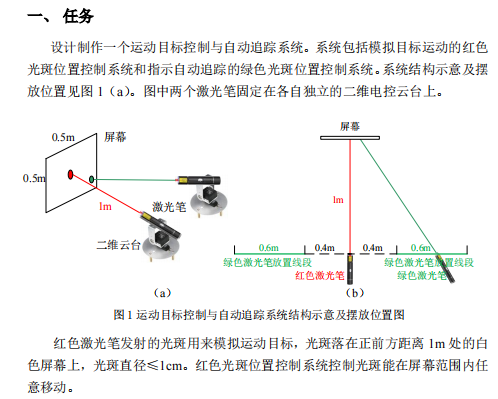
该系统以TI公司的TM4C123G为控制内核,设计运动目标控制与自动追踪系统。本系统利用OpenMV4 Cam H7 Plus实现红色激光、绿色激光、黑色矩形等目标位置信息获取;使用数字舵机,结合PID算法控制红色激光与绿色激光运动。红色光斑位置控制系统通过OpenMV对屏幕进行位置标定,获取红色光斑以及黑色矩形位置信息, TM4C123G控制数字舵机实现运动目标;绿色光斑位置控制系统获取红色光斑与绿色光斑位置信息从而实现运动目标追踪。通过TM4C123G按键实现一键启动以及立即制动功能。本系统结构合理,可靠性高,可以完成测试任务。
系统方案
舵机选择
方案一:使用数字舵机,利用PWM波控制,精度较高,动力较稳定且强劲。
方案二:使用飞特STS3032舵机,整体结构紧凑,扭矩大,精度高
方案三:使用总线舵机,利用IO进行控制,可以与主控通信,方便检测运动角度以及定位。
方案选择:方案一数字舵机相对成熟,精度高能较好地满足测试要求;方案二STS3032精度更高,但整体结构偏小没有完善的运动云台;方案三总线舵机与传统舵机控制方式不同,存在可能通信中断的情况。因此选择方案一。
摄像头选择
方案一:使用OpenMV4 Cam H7 Plus
方案二:使用K210
方案三:使用USB摄像头
方案选择:方案二相较于方案一,OpenMV运算性能更强,能更好地获取红色色斑以及绿色色斑的位置信息;而方案三需要USB接口不便于用TM4C123G进行控制。综上所述,选择方案一。
系统总体方案设计
根据题目要求,基本需要LCD显示屏,摄像头以及舵机等外设,用按键输入选择系统需要执行的相关程序,从而实现不同任务之间的切换。摄像头用于图像采集红色光斑和绿色光斑当前位置与目标位置,通过串口与主控进行通信,利用PID算法进行控制,从而实现运动控制以及目标追踪任务。
理论分析
摄像头检测激光光斑算法的分析
根据摄像头成像原理,考虑都其余的几何体在转向时由于角度变化会使得成像面积发生改变, OpenMV距离控制的原理如下所示:
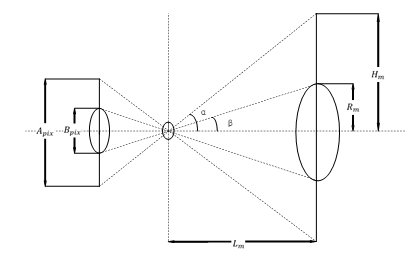
根据几何关系可知:

其中,Lm表示真实长度,B为摄像头光斑所占的像素,A是摄像头能捕捉的固定像素,α是视角的一半、即得到距离=常数/直径的像素,该常数可以通过测定固定距离下光斑的像素大小来确定,经测试,在题目所要求的精度要求下误差较小,可以满足精确度要求。
电路与程序设计
电路设计
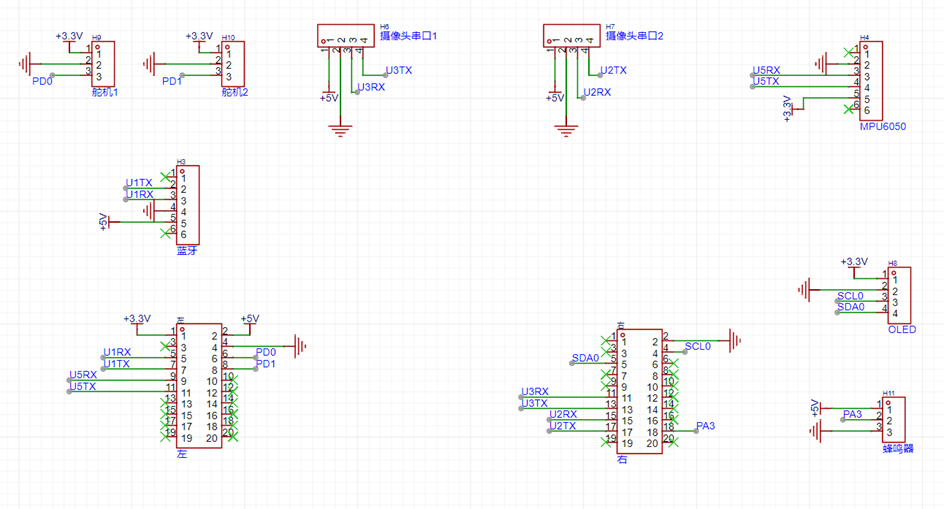
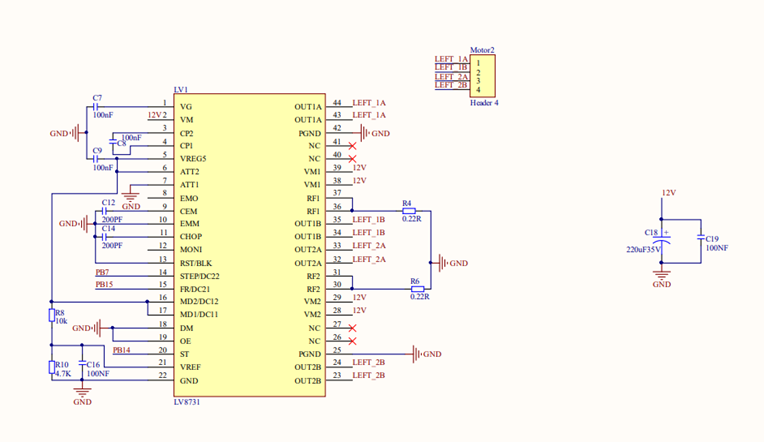
单片机电压由LV8731芯片组成的驱动板提供,单片机引脚引出串口与蓝牙(调试用)以及摄像头进行通信(不同系统互相不通信) ,舵机由单片机输出所需占空比的PWM波控制
程序设计
待更新



