
项目链接(Github):
利用深度学习技术可以实现对特定动物的识别,具有重大意义
相关文献
Smith, J., & Chen, L. (2023). Real-time animal recognition system based on YOLOv8. International Journal of Artificial Intelligence Research, 15(2), 78-92. The authors present a real-time animal recognition system utilizing YOLOv8, detailing the architecture and training strategies that enhance detection accuracy in complex environments.
Patel, R., & Kumar, S. (2023). Improving wildlife monitoring through YOLOv8: A deep learning approach. Ecological Informatics, 18(1), 101-115. This study explores the application of YOLOv8 in wildlife monitoring systems, emphasizing its advantages in speed and accuracy compared to earlier versions.
Zhang, Y., & Liu, X. (2023). A comprehensive study on animal detection using YOLOv8 and its predecessors. Journal of Computer Vision and Image Processing, 12(3), 45-60. This paper discusses the implementation of YOLOv8 for animal detection, comparing its performance with YOLOv7, YOLOv6, and YOLOv5 across various datasets.
Liu, H., & Zhang, T. (2023). Development of a multi-class animal recognition system using YOLOv8. International Journal of Computer Vision and Image Processing, 14(4), 55-70. This paper discusses the architecture and implementation of a multi-class animal recognition system utilizing YOLOv8, emphasizing its performance improvements over previous YOLO versions.
Wang, Q., & Li, J. (2023). Real-time animal detection and classification using YOLOv8: A web-based application. Journal of Machine Learning and Applications, 9(2), 112-126. The authors present a web-based application for real-time animal detection using YOLOv8, detailing the user interface design and backend implementation.
Zhao, Y., & Chen, M. (2023). Enhancing wildlife monitoring through advanced YOLOv8 techniques. Ecological Informatics, 20(1), 88-101. This study explores how advanced techniques in YOLOv8 can enhance wildlife monitoring systems, focusing on accuracy and efficiency in diverse environmental conditions.
Zhang, X., & Li, Y. (2023). Comparative analysis of YOLO models for animal species recognition. Journal of Artificial Intelligence Research, 16(3), 203-218. This article provides a comparative analysis of various YOLO models, including YOLOv8, in the context of animal species recognition tasks.
本文方法
NMYOLO官方对于yolov8进行了详细的图解,如果你感兴趣的话,可以进入下面的链接查看
mmyolo/configs/yolov8/README.md at dev · open-mmlab/mmyolo · GitHub
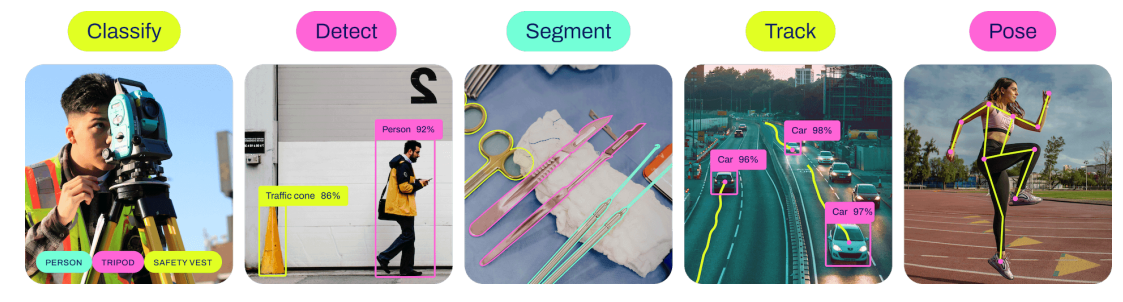
Ultralytics开发的YOLOv8是一款尖端、最先进(SOTA)的模型,它借鉴了之前YOLO版本的成功经验,并引入了新的特性和改进,以进一步提高性能和灵活性。YOLOv8旨在实现快速、准确和易于使用,因此是各种目标检测、图像分割和图像分类任务的绝佳选择。除了支持最经典的目标检测任务之外,还添加了对语义分割、分类和追踪等任务的支持。
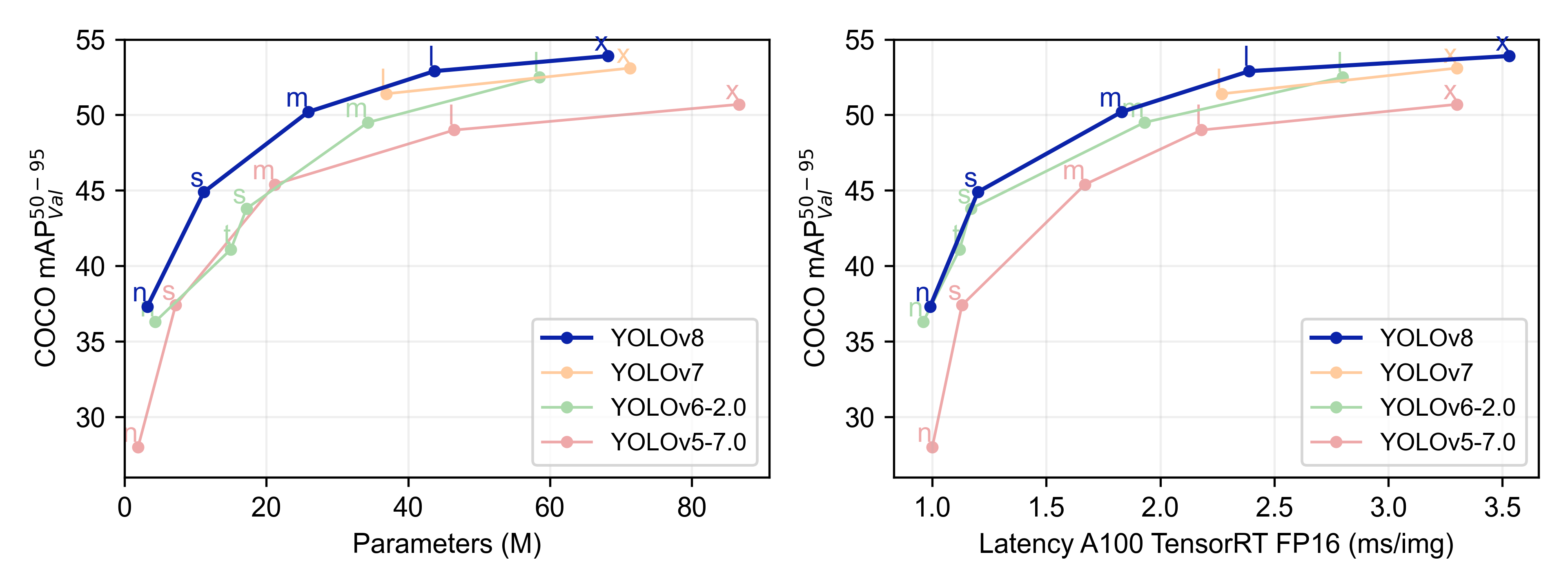
首先来看一下YOLOv8算法的性能.根据官方提供的性能图,其中左图的横坐标表示的是网络的参数量,右图的横坐标表示的网络在A100显卡上的推理速度,纵坐标方面表示表示的都是模型的精度。可以看到,YOLOv8模型的在同样的参数量下,比其他系列的YOLO模型有明显的精度提升,在右图展示的同样的map精度下,YOLOv8的模型也同样有更快的速度,还就那个更高、更快、更强
总的来说,yolov8算法的核心点在于
1. 给出了一个全新的视觉模型,保持精度的同时,实现了较高的检测速度,并且同时支持支持图像分类、物体检测和实例分割等多种视觉任务。并且根据卷积层提供了多个规模的模型(nano、small、medium、large和x-large),满足用户不同场景的需要。
2. 新的骨干网络:YOLOv8引入了一个新的骨干网络,可能参考了YOLOv7 ELAN设计思想,将YOLOv5中的C3结构换成了梯度流更丰富的C2f结构,并对不同尺度模型调整了不同的通道数,大幅提升了模型性能。
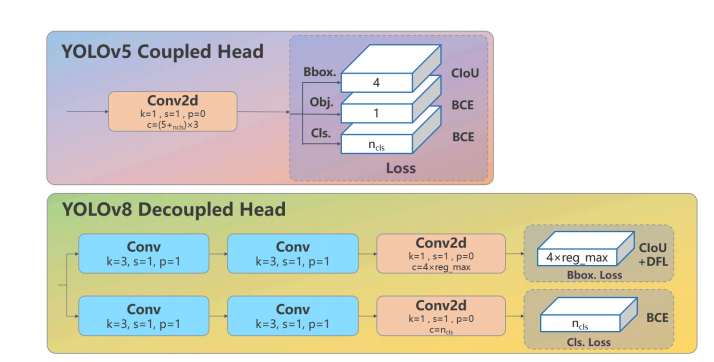
3. 解耦头的设计:YOLOv8的Head部分从原先的耦合头变成了解耦头结构,将分类和检测头分离,并且从Anchor-Based转变为Anchor-Free,简化了模型结构并提高了推理速度。
4. 新的损失函数:YOLOv8在Loss计算方面采用了TaskAlignedAssigner正样本分配策略,并引入了Distribution Focal Loss,确保了检测结果的准确性和鲁棒性。
结构说明
根据NMYOLO给出图可以知道

其中Backbone是骨干网络部分·,主要是做特征提取,从这个网络中可以提取出三个不同尺度的特征出来,然后送入Neck部分,Neck部分主要是做一些融合,融合之后的特征会送入Head部分做进一步的解码,解码的部分分为两个部分,一个是bonding box(边界框的解码)另一个是Class loss(分类的解码)
骨干网络部分
骨干网络的配置文件如下所示:
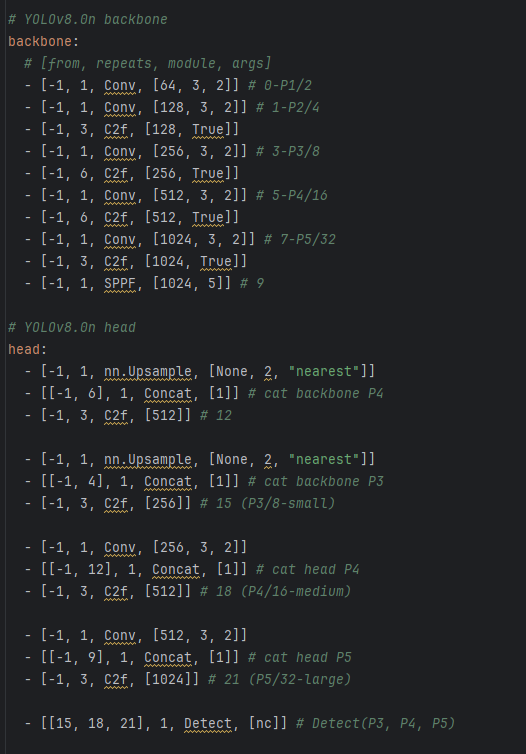
下面的图是YOLO模型原先使用的C3结构和新的C2f的结构。
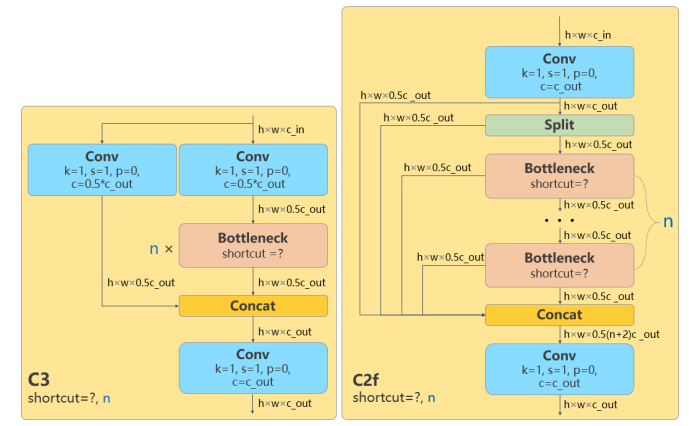
其中C3表示使用常规的三个卷积模块,c2f表示使用了2个卷积模块并且更快(fast),在不改变原始架构和梯度传输路径的前提下, 使用分组卷积踢来以及使用洗牌和合并的操作组合不同组的特征,增强模型从不同特征图中的学习能力,达到改善参数的作用。和左图相比,增加了更多的跳层的连接和split操作。从源码中可以看出,对于原先的结构而言,只使用了一次cat操作,对于c2f结构而言,使用了多次的split操作和cat操作,按照原文的说法是增加了梯度流。
class C3(nn.Module):
"""
这里是使用了3个卷积层的csp结构
CSP Bottleneck with 3 convolutions.
"""
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
"""Initialize the CSP Bottleneck with given channels, number,
shortcut, groups, and expansion values."""
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, k=((1, 1),(3, 3)), e=1.0) for _ in range(n)))
def forward(self, x):
"""Forward pass through the CSP bottleneck with 2 convolutions."""
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
class C2f(nn.Module):
"""
这里使用了分支处理的操作,使用的是通过关闭残差链接的方式实现
先进行分支的操作然后再进行特征融合的操作
Faster Implementation of CSP Bottleneck with 2 convolutions.
"""
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
"""Initialize CSP bottleneck layer with two convolutions with
arguments ch_in, ch_out, number, shortcut, groups,
expansion.
"""
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3,3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
"""Forward pass through C2f layer."""
y = list(self.cv1(x).chunk(2, 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
def forward_split(self, x):
"""Forward pass using split() instead of chunk()."""
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))解码头部分
解码头部分选择了使用分类的解码头,即边界框回归和分类分别作为两个分支处理。在原解码头部分,上图显示了经过主干网络提取特征后的特征图,直接进入解码模块,包含边界框回归的CIoU、置信度计算的obj和分类类别计算的CLS。改进后的解码头如下图所示,经过主干网络提取特征后,上方分支用于回归,下方分支用于分类,去除了之前的obj部分。在回归分支中,采用了Distribution Focal Loss。
DFL损失函数的定义如下:在训练过程中,目标的边界框被视为一个分布而非确定的数值。以浪花物体为例,其边界并非清晰可辨,而是模糊不定的。通过这样的损失函数设计,可以有效减少网络在训练过程中出现过拟合现象,提高模型的泛化能力。

实现的代码如下,这个函数实现了 Distribution Focal Loss (DFL),用于学习密集目标检测中的合格和分布式边界框。通过计算目标距离标签的左右边界,并结合交叉熵损失,计算出最终的损失值。
def distribution_focal_loss(pred, label):
r"""Distribution Focal Loss (DFL) is from `Generalized Focal Loss:
Learning Qualified and Distributed Bounding Boxes for Dense Object Detection
<https://arxiv.org/abs/2006.04388>`_.
Args:
pred (torch.Tensor): Predicted general distribution of bounding boxes
(before softmax) with shape (N, n+1), n is the max value of the
integral set `{0, ..., n}` in paper.
label (torch.Tensor): Target distance label for bounding boxes with
shape (N,).
Returns:
torch.Tensor: Loss tensor with shape (N,).
"""
# label为y, pred为y^(y的估计值)
# 因为y_i <= y <= y_i+1(paper)
# 取dis_left = y_i, dis_right = y_i+1
dis_left = label.long()
dis_right = dis_left + 1
weight_left = dis_right.float() - label # y_i+1 - y
weight_right = label - dis_left.float() # y - y_i
# paper中的log(S)这里用CE
loss = (
F.cross_entropy(pred, dis_left, reduction="none") * weight_left
+ F.cross_entropy(pred, dis_right, reduction="none") * weight_right
)
return loss损失函数
YOLOv8的损失计算包括分类和回归两个部分,不再包含之前的目标置信度分支。分类分支采用二元交叉熵损失(BCE Loss),回归分支则采用了两个部分:Distribution Focal Loss和CIoU Loss。这三个损失函数按照设定的权重比例进行加权计算,为模型的训练提供了更精确和全面的指导。
在YOLOv8中采用了TOOD的TaskAlignedAssigner策略,该策略是一种动态分配对象的方法,根据分类和回归的分数加权来选择正样本。这种匹配策略的简单总结为:根据物体在分类和回归任务中的得分情况,来选取正样本,以提高模型在目标检测任务中的准确性和效率。
数据增强
数据增强在YOLOv8中得到了进一步的加强,继承了YOLOv5的颜色变换、马赛克数据增强和随机剪切等一系列传统方式,并引入了YOLOX的数据增强策略。与以往不同的是,在训练的前期阶段充分利用数据增强技术,而在接近尾声的最后10个epoch中则关闭数据增强,以达到更好的训练效果。
训练策略说明
YOLOv8在推理过程中与YOLOv5几乎一模一样,唯一的区别在于对Distribution Focal Loss中的积分表示bbox形式进行解码,转换成常规的4维bbox形式,接下来的计算过程与YOLOv5相似。以COCO的80类为例,假设输入图片尺寸为640x640,在MMYOLO实现中的推理过程如下所示:
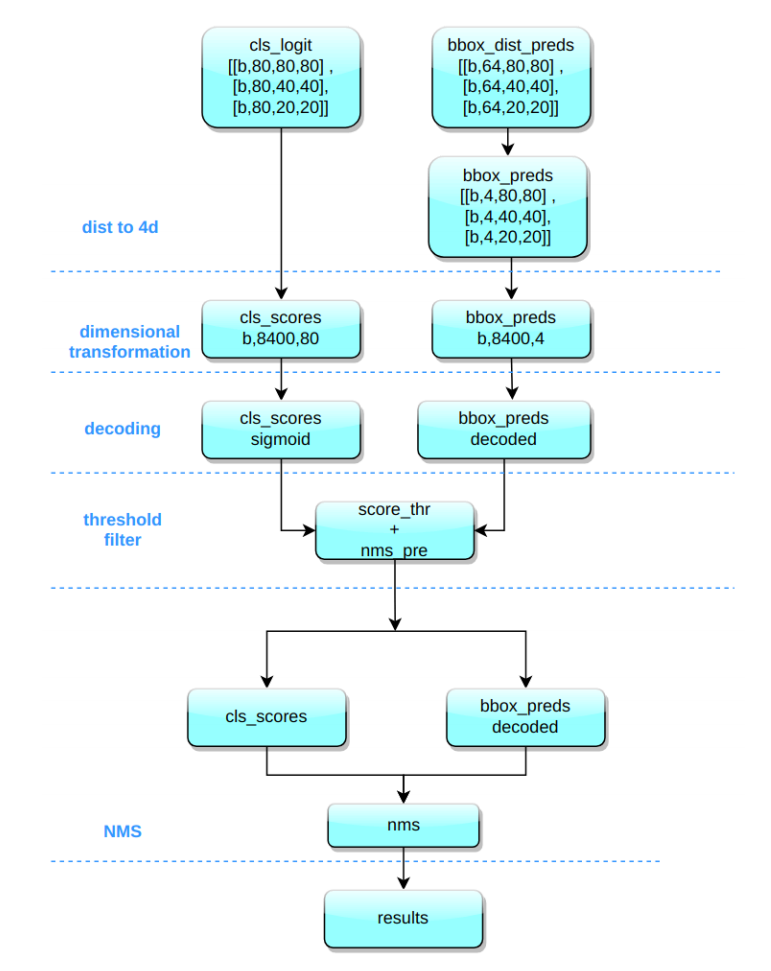
将bbox的积分形式通过Softmax和Conv转换为4维bbox格式,对Head输出的bbox分支进行处理。
YOLOv8输出的特征图包括尺度为80x80、40x40和20x20的三个特征图。Head部分输出分类和回归共6个尺度的特征图,将不同尺度的类别预测分支和bbox预测分支进行拼接,并进行维度变换。类别预测分支和bbox预测分支的形状分别为(b,8400,80)和(b,8400,4),为了后续处理方便,将通道维度置换到最后。
对分类预测分支进行Sigmoid计算,对bbox预测分支进行解码,还原为真实的原图解码后的xyxy格式。
在遍历batch中的每张图时,使用score_thr进行阈值过滤,考虑multi_label和nms_pre,确保过滤后的检测框数量不会超过nms_pre。
将剩余的检测框还原到网络输出前的原图尺度,然后进行nms处理。最终输出的检测框数量不会超过max_per_img。
实操:实验配置
理论上如果要应用在V5、V7等其他版本,只需要稍微修改下配置文件即可。
注意,以下所有的配置基于我自己的代码文件,如果你需要可以联系我(*^_^*)
推荐该项目使用Anaconda+Pycharm组合使用,使用Anaconda创建虚拟环境(毕竟每一个项目所依赖的版本不同),并且在Pycharm中可以方便管理工程项目文件和使用conda虚拟环境
使用Anaconda创建一个虚拟环境之前,务必进行国内源切换,不然有些包的安装会很麻烦
conda config --remove-key channels
conda config --add channels
https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda config --add channels
https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
conda config --add channels
https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/pytorch/
conda config --set show_channel_urls yes
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple创建虚拟环境(使用的Python版本是3.8.5)后,利用Pycharm打开工程文件,并将python解释器换成conda的虚拟环境,随后安装pytorch
conda install pytorch==1.8.0 torchvision torchaudio cudatoolkit=10.2 # 注意这条命令指定Pytorch的版本和cuda的版本,10系显卡
conda install pytorch==1.10.0 torchvision torchaudio cudatoolkit=11.3 # 30系列以上显卡gpu版本pytorch安装指令
conda install pytorch==1.8.0 torchvision==0.9.0 torchaudio==0.8.0 cpuonly #仅CPU的执行这条命令即可cd进入到pyproject.toml文件所在的路径,安装其他依赖库
pip install -v -e .训练自己的数据集
首先存放数据集的地方应该有两个部分,一个是images,一个是labels

images文件夹用来存放原始的图片数据,包括训练集和测试集,而labels文件夹则是对应的标签
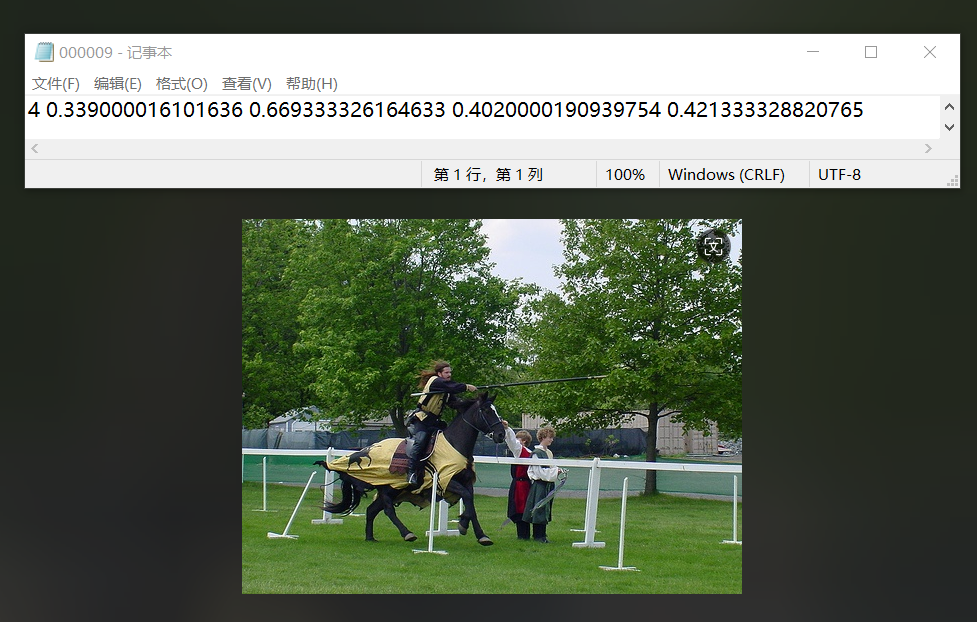
这个标签文件一共是由五个部分组成,因为图中只有一个动物,所以标签内只有一行,标签每一行第一个数字代表是类别,在这个示例中,动物是马所以是4,第二个和第三个数字代表是标记框的中心点的x,y的坐标,而后面两个数字代表的是标记框的长,宽,这些数字做过归一化的处理,所以是0~1之间的数字。按照这个标准来放置数据,可以为后续训练提供方便。如果你需要使用自己的数据集,那么就需要对图片进行标注。
对图片进行标注
在pycharm终端中,输入labelimg,启动标注软件
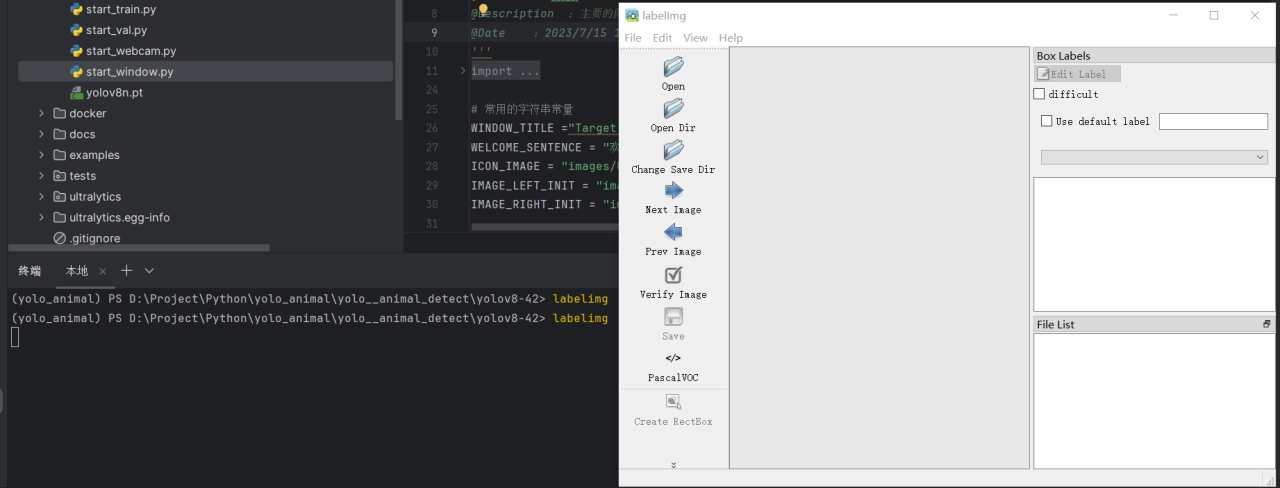
注意!在这里标注的图像一定要是英文路径,最好是一次标注完,这样标签不会产生错位
点击Change Save Dir选择你存放的文件夹路径,再点击Open Dir打开存放原始图片的文件
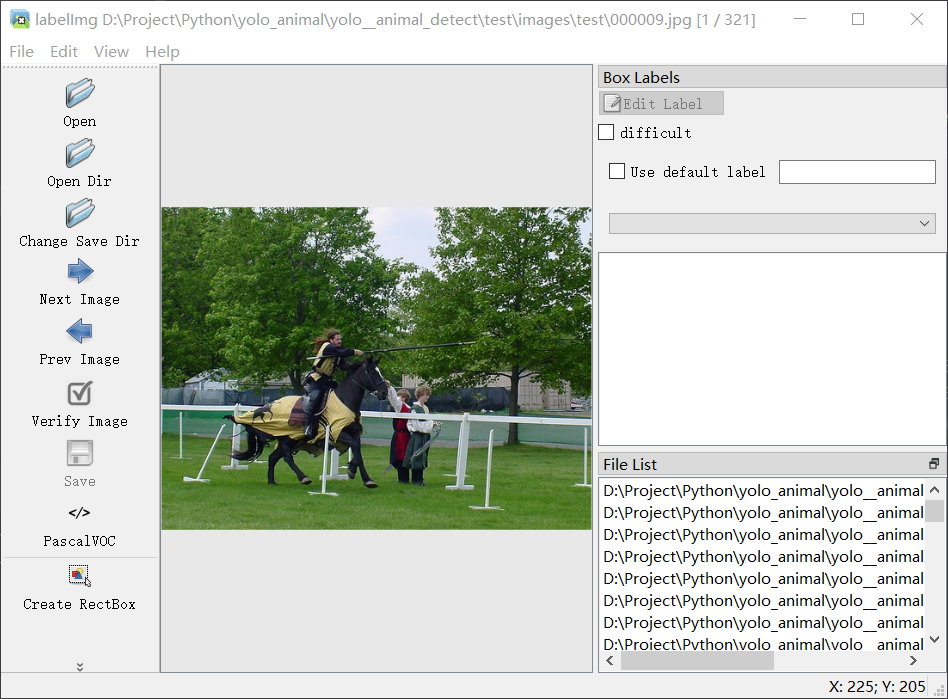
点击Pascal VOC将转换的格式改成yolo,然后点击Create RectBox开始标框,并注明类别,每完成一个酒店及Next Image切换到下一张图片,对应的存放标签的文件就会存放标签,而classes.txt文件则存放着你的标签种类,顺序一定不能变,因为这个和你的标签文件是一一对应的
模型训练和模型测试
在ultralytics目录找到配置文件,将路径修改完成(根目录、训练集、测试集等)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: D:/Project/Python/yolo_animal/yolo__animal_detect/animal_yolo_format #绝对路径相对路径均可
train: # train images (relative to 'path') 16551 images
- images/train
val: # val images (relative to 'path') 4952 images
- images/val
test: # test images (optional)
- images/test
# Classes
names:
0: bird
1: cat
2: cow
3: dog
4: horse
5: sheep配置好配置文件后,回到模型的配置文件
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)最上面的nc是类别数目,会根据数据集改变,不需要专门更改
有了配置文件后可以开始进行训练了
import time
from ultralytics import YOLO
# yolov8n模型训练:训练模型的数据为'A_my_data.yaml',轮数为100,图片大小为640,设备为本地的GPU显卡,关闭多线程的加载,图像加载的批次大小为4,开启图片缓存
model = YOLO('yolov8n.pt') # load a pretrained model (recommended for training)
results = model.train(data='A_my_data.yaml', epochs=100, imgsz=640, device=[0,], workers=0, batch=4, cache=True) # 开始训练
time.sleep(10) # 睡眠10s,主要是用于服务器多次训练的过程中使用
# yolov3n模型训练:
model = YOLO('../../pretrained/yolov8s.pt') # load a pretrained model (recommended for training)
results = model.train(data='A_my_data.yaml', epochs=100, imgsz=640, device=[0,], workers=0, batch=4, cache=True) # 开始训练
time.sleep(10) # 睡眠10s,主要是用于服务器多次训练的过程中使用
# yolov5l模型训练:
model = YOLO('../../pretrained/yolov9s.pt') # load a pretrained model (recommended for training)
results = model.train(data='A_my_data.yaml', epochs=100, imgsz=640, device=[0,], workers=0, batch=4, cache=True) # 开始训练
time.sleep(10) # 睡眠10s,主要是用于服务器多次训练的过程中使用
# yolov8l模型训练:
model = YOLO('../../pretrained/yolov10s.pt') # load a pretrained model (recommended for training)
results = model.train(data='A_my_data.yaml', epochs=100, imgsz=640, device=[0,], workers=0, batch=4, cache=True) # 开始训练
time.sleep(10) # 睡眠10s,主要是用于服务器多次训练的过程中使用训练结束后一般会得到一系列文件,其中weights文件夹下best.pt和last.pt分别代表最佳和最后的模型,args.yaml是参数文件,还有些关于模型评价的图片
然后验证模型
from ultralytics import YOLO
# 加载自己训练好的模型,填写相对于这个脚本的相对路径或者填写绝对路径均可
model = YOLO("runs/detect/yolov8n/weights/best.pt")
# 开始进行验证,验证的数据集为'A_my_data.yaml',图像大小为640,批次大小为4,置信度分数为0.25,交并比的阈值为0.6,设备为0,关闭多线程(windows下使用多线程加载数据容易出现问题)
validation_results = model.val(data='A_my_data.yaml', imgsz=640, batch=4, conf=0.25, iou=0.6, device="0", workers=0)模型预测和图形化界面开发
拿到训练完的模型后,就可以进行后续的开发了
比如做一个预测的脚本
from ultralytics import YOLO
# Load a model
model = YOLO("yolov8n.pt") # pretrained YOLOv8n model
# Run batched inference on a list of images
results = model(["images/resources/demo.jpg", ]) # return a list of Results objects
# Process results list
for result in results:
boxes = result.boxes # Boxes object for bounding box outputs
masks = result.masks # Masks object for segmentation masks outputs
keypoints = result.keypoints # Keypoints object for pose outputs
probs = result.probs # Probs object for classification outputs
obb = result.obb # Oriented boxes object for OBB outputs
result.show() # display to screen
result.save(filename="images/resources/result.jpg") # save to disk除此以外还可以基于pyside6进行图形化开发
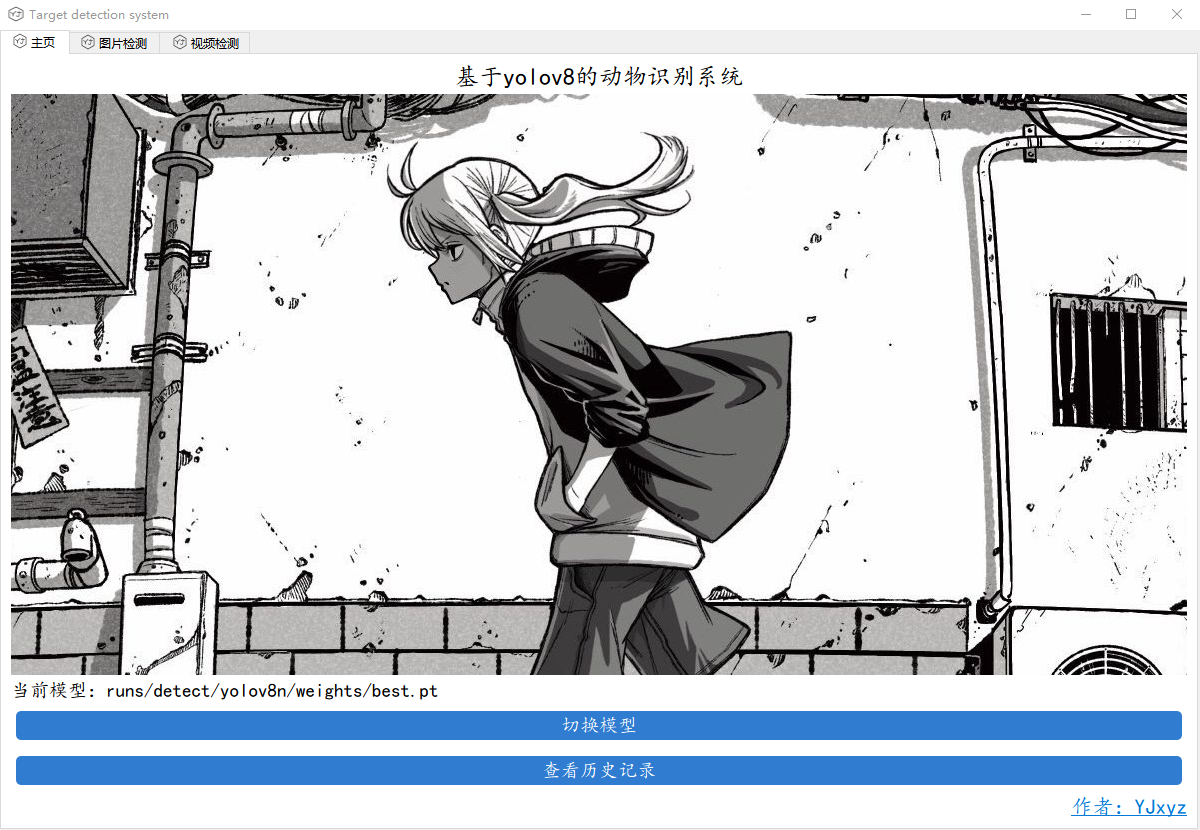
待更新



